PESI
物理增强空间智能实验室
@ 北京邮电大学
最新动态 Latest News


韩国TOP2 AI公司董事长李社长参观PESI实验室产品 交流访问

PESI实验室联合北京大学医学院及北京师范大学年度总结会 交流访问

团队全体成员前往日本东京参加SIGGRAPH ASIA'24并组织团建活动 团队活动



DirectL被SIGGRAPH ASIA'24 & ACM TOG接收 CCF-A
VISTA被ACL'24接收 CCF-A
LayoutPointer被NAACL'24接收 CCF-B
DocDiff被ACM MM'23接收 CCF-A
PESI团队
教师

成果
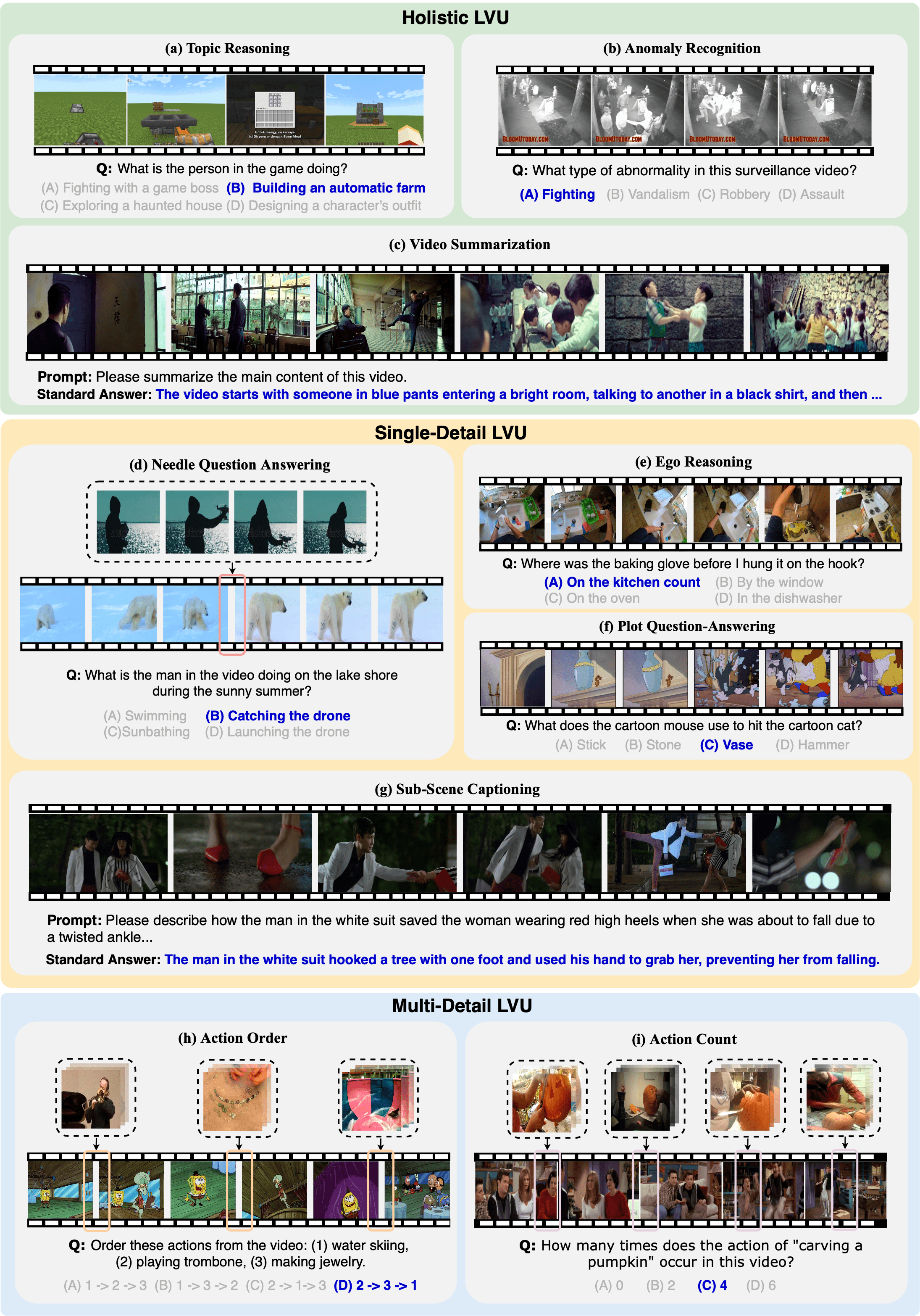
多任务长视频理解评测集MLVU
该评测集由实验室指导老师熊永平和博士生周俊杰联合智源研究院、北京大学等单位共同创建并发布。发布半年来,MLVU已被包括Meta AI, Nvidia NV Lab, 腾讯、字节等顶尖AI研发机构广泛使用。
评测集代表工作
MegaPairs: Massive Data Synthesis For Universal Multimodal Retrieval
⌈ACL 2025 Oral, CCF A类会议⌋

EYE^3: :Turn Anything into Naked-eye 3D
⌈ICCV 2025, CCF A类会议⌋
CPG: Contrastive Patch-Graph learning for 3D point cloud
⌈Pattern Recogntion'25, CCF B类及SCI 1区TOP期刊⌋
DirectL: Efficient Radiance Fields Rendering for 3D Light Field Displays
⌈SIGGRAPH ASIA'24/TOG, CCF A类会议及期刊⌋
VISTA: Visualized Text Embedding For Universal Multi-Modal Retrieval
⌈ACL'24, CCF A类会议⌋
DocDiff: Document Enhancement via Residual Diffusion Model
⌈ACM MM'23, CCF A类会议⌋

LayoutPointer: A Spatial-Context Adaptive Pointer Network for Visual Information Extraction
⌈NAACL'24, CCF B类会议⌋

GDB: Gated convolutions-based Document Binarization
⌈Pattern Recognition'24, CCF B类及SCI 1区TOP期刊⌋

Document Binarization with Multi-Branch Gated Convolutional Generative Adversarial Networks
⌈ICIP'23, CCF C类会议⌋
CarveNet: A Channel-Wise Attention-Based Network for Irregular Scene Text Recognition
⌈IJDAR'22, CCF C类期刊⌋
FAT: Field-Aware Transformer for Point Cloud Segmentation With Adaptive Attention Fields
⌈IEEE Transactions on Industrial Informatics, SCI 1区TOP期刊⌋
Towards Scalable Training for Handwritten Mathematical Expression Recognition
